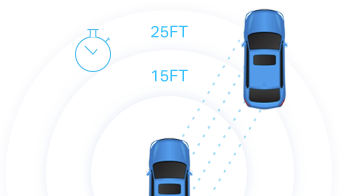
Cameras produce 2D images of the environment. Lidar “sees” in 3D, a huge advantage when accuracy and precision is paramount. The laser-based technology produces real-time, high-resolution 3D maps, or point clouds, of the surroundings, demonstrating a level of distance accuracy that is unmatched by cameras, even ones with stereo vision. Whereas cameras have to make assumptions about an object’s distance, lidar produces and provides exact measurements. For this reason, autonomous or highly automated systems require lidar for safe navigation. The ability to “see” in 3D cannot be underestimated. Lidar produces millions of data points at nearly the speed of light. Each point provides a precise measurement of the environment. Compared to camera systems, lidar’s ability to “see” by way of precise mathematical measurements decreases the chance of feeding false information from the vision systems to the car’s computer.
Camera performance is also greatly impacted by environmental conditions (e.g., bright sunlight/glare and darkness) and is therefore more susceptible to unpredictable blind spots and generating false positives or negatives. Whereas cameras are dependent on ambient light conditions and face challenges with darkness and glare, lidar provides its own light source and can therefore “see” in all lighting conditions.
Lidar has an additional technological advantage over camera systems: lidar allows the vehicle’s computer to “see” the driving environment from an overhead, bird’s eye perspective. The car navigates not only from a traditional driver’s point of view, but can also “see” itself from the perspective of a bird flying overhead, similar to the views offered in many video games. Thus, lidar “sees” more comprehensively than a person, simultaneously looking down on all sides of the car, road, and traffic.
With accuracy and safety in mind, a lidar-centric autonomous system is a necessity. This means lidar is the central sensor and small inexpensive cameras can be added to the system for redundancy and extra care.