









AutonomouStuff began in 2010 when founder Bobby Hambrick noticed robotics companies were having a hard time accessing technology due to a significant gap in the industry supply chain. AutonomouStuff filled that gap through a vision to provide everything necessary to launch autonomy projects. The company grew to occupy offices around the world and joined Hexagon AB in 2018. The mission expanded accordingly; it now includes expertise not only with components, but also engineering services, software and data intelligence. AutonomouStuff has provided more technology and has built more platforms for automated driving research than any other company in the world. Relationships with partners such as Velodyne Lidar, which create top-quality products essential to autonomy, help AutonomouStuff remain true to the original goal of customer satisfaction while achieving the broader objective of enabling, accelerating and deploying the future of autonomy.
AutonomouStuff kicked off the Open Autonomy Pilot (OAP) in the summer of 2019 in downtown Peoria, Illinois, with the ultimate goal of driving an autonomous vehicle on a loop through the city to gather data and test software. The team deployed an AutonomouStuff Lexus RX450h Automated Research Development Platform outfitted with a Velodyne Ultra Puck, Autoware,and other components. AutonomouStuff has built hundreds of similar platforms, most with rail-mounted lidar sensors for R&D units, but many with lidar seamlessly integrated for a showroom finish. The OAP vehicle must contend with one-way streets, traffic lights, stop signs, a roundabout and the most expected yet unpredictable aspects of any journey behind the wheel: other motorists and pedestrians.
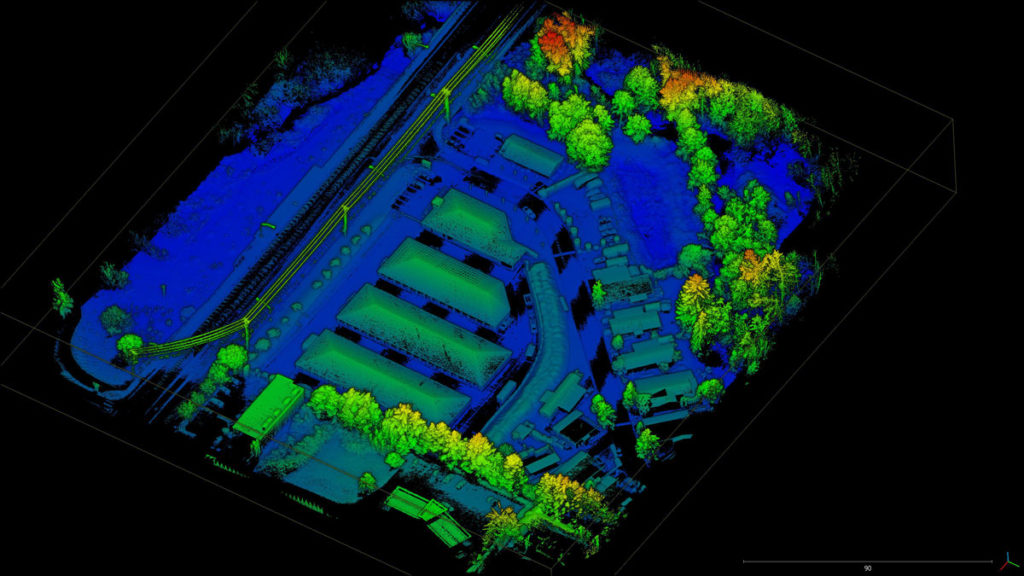
AutonomouStuff relies on Velodyne lidar sensors as critical components of its Automated Research Development Platforms, as demonstrated in the OAP project. In conjunction with the Autoware-based autonomous software stack, the Velodyne Ultra Puck on the OAP vehicle generates data used for both localization and object detection. The point cloud created from lidar data provides critical input for the generation of high definition maps. AutonomouStuff additionally developed a modular software suite called Lidar Object Processing (LOP) that was tuned using a Velodyne Ultra Puck to establish the ground plane and detect and track objects above it. Though optimized for the Ultra Puck, LOP’s compatibility with Velodyne sensors currently extends to other units in their Puck family of surround-view products, with the potential for further expansion to more Velodyne lidar models.
When OAP launched, the first stage focused on software monitoring: an AutonomouStuff engineer maintained continuous manual control of the test vehicle while driving the loop through downtown Peoria. At the same time, the engineer ran the autonomous software to compare how the stack would respond to conditions encountered by the driver. After a few months, the pilot entered the second stage: autonomous operation throughout the entire loop, with a safety driver poised to take over at any instant if a hazardous scenario presented itself. The data gathered by the Velodyne Ultra Puck as part of the localization and object detection processes was recorded and integrated into digital simulations for further testing and validation. This process contributed to the AutonomouStuff mission of enabling, accelerating and deploying the future of autonomy.

“In addition to collecting data from the Velodyne Ultra Puck to create maps, we use the lidar data in real time for localization within that map. The tight vertical beam spacing around the horizon and extended range of the Ultra Puck allow us to detect objects on the intended path at a greater distance than ever before.”
“As we continue developing AI algorithms within Autoware software, we will use data from Velodyne’s lidar sensors for tasks such as classification of pedestrians and to fuse distance information with imagery obtained from cameras.”