






Kaarta® is a leading innovator of real-time mobile 3D reality capture, mapping complex environments with unprecedented speed, fidelity, and ease. The company’s patent-pending technology, rooted in advanced robotics, accurately reproduces the real world in digital 3D models.
The 3D data generated by Kaarta’s products can be utilized in a range of mapping applications. For example, Allvision IO, a company specializing in extracting and analyzing high-frequency data for mobility insights, utilizes the Kaarta platform in its Parkview solution, which enables city planners to monitor parking behavior to improve transportation planning and curb management.
Allvision was petitioned by the City of Pittsburgh to conduct detailed curb and parking analysis in its Strip District, an active neighborhood known for high on-street parking demands.
Curb access and traffic flow have become more complex due to an increasing presence of delivery service vehicles and new mobility options, such as ride shares and e-scooters. Despite the capabilities of satellite and airborne imagery, the most effective way to capture high-fidelity details of ground-level infrastructure is from terrestrial data capture, which previously involved tedious and inaccurate manual inspection and survey.
Typical mobile mapping systems suffer from the “urban canyon” effect, in which Global Navigation Satellite System (GNSS) positioning inconsistencies make the data untrustworthy or difficult to process. Dense urban environments require sensor technologies with high performance image resolution, range, and accuracy to enable detection and modeling of all required objects.
Unlike traditional terrestrial data capture, the Kaarta Stencil® product family provides a flexible platform for long-range mobile 3D scan technology, mapping across a wide variety of outdoor and large-scale indoor applications to produce a unified 3D model of the area scanned. Kaarta solutions are robust in practice and consistent in results.
The Stencil product range is equipped with Velodyne lidar sensors: Stencil 2-16 incorporates Velodyne Puck while Stencil 2-32 incorporates Velodyne HDL-32E. Kaarta technology then takes lidar data to new levels. Kaarta’s innovation in mobile mapping and localization stems
from advanced robotics technology combining input from multiple sensors – predominantly lidar, visual odometry and IMU – and processing that data in real time. Mapping is performed on the move – hand carried or vehicle mounted – without the need for additional infrastructure. For some applications, the data can be further enhanced with GNSS and wheel odometry sensors.
Allvision’s AI software processes Stencil data and learns to recognize items such as curbs, manholes, signs, poles, and other features, providing valuable insights into the curb landscape.
The system overcomes the “urban canyon” challenge by enabling mapping without GNSS.
Velodyne’s lidar technology delivers the range, field of view, and image density required by Stencil, all in a compact and lightweight form factor. Velodyne’s surround view sensors provide a full 360-degree field of view, which allows Stencil to model key infrastructure elements from a variety of perspectives.
Allvision utilizes 3D data generated by Stencil to develop its Parkview solution, which efficiently inventories and monitors curbs and surrounding areas to support educated decisions on permitting, repairs, and infrastructure regulation. Allvision Parkview allows city planners to monitor parking behavior to improve transportation planning and curb management.
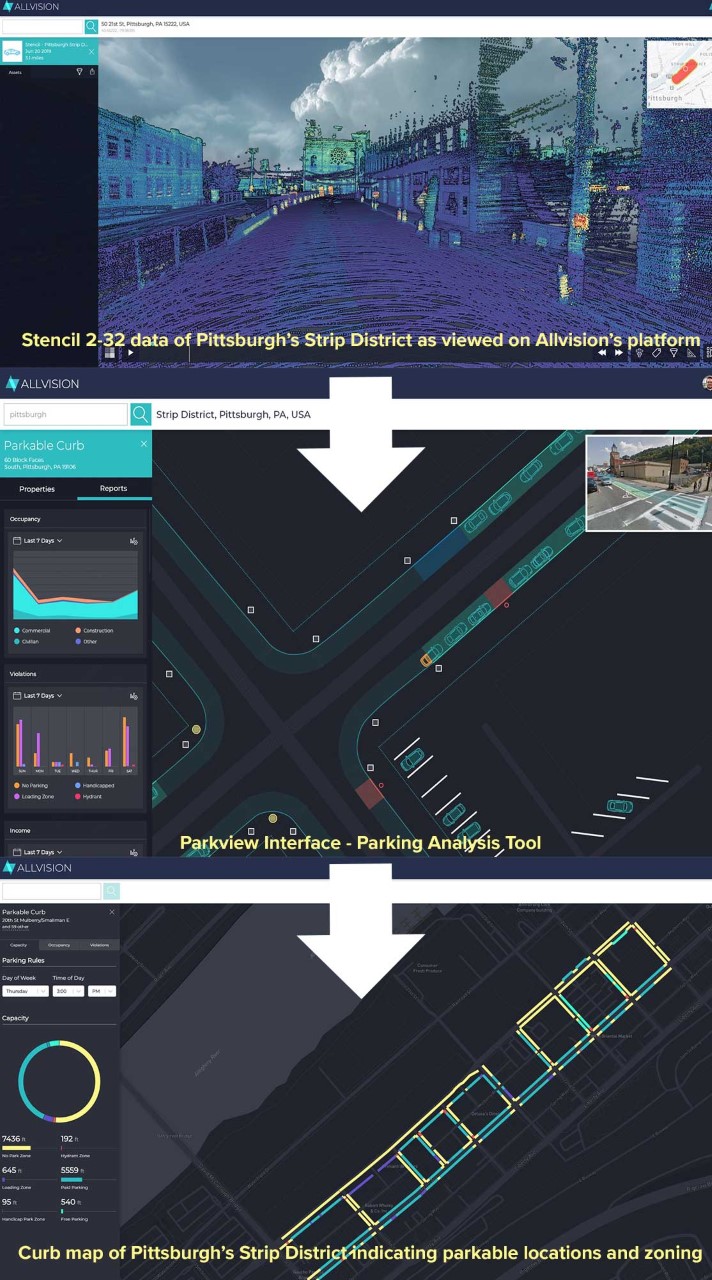
Using its Parkview solution, Allvision successfully analyzed the Pittsburgh Strip District for parking inventory and occupancy over several weeks with a Stencil system equipped with a Velodyne lidar sensor.
The first pass through the target area took less than one hour. It resulted in a complete and dimensionally accurate Curb Map, which included a model of curbs, curb cuts, parking signage, fire hydrants, and parking rules. Subsequent vehicle mapping passes, which occurred hourly on Tuesdays, Thursdays, and Sundays for two weeks, documented parking behavior in the area. The resultant point cloud data detailed crosswalks, curbs, signs, graffiti, and other small roadside objects, providing information not previously available.
The findings were aggregated into parking trends, such as occupancy and availability patterns during weekends or Tuesdays during the lunch hour. The information will be utilized to establish new zoning policies, assess parking infrastructure, and help in the design of new mobility features such as bike lanes and mass transit. With the Velodyne hardware, Kaarta’s mapping and localization intelligence powering the collection, and Allvision’s software aggregating and making sense of the data, the city is now able to develop efficient and equitable urban mobility, enable quicker deliveries and significantly improve public parking experiences.
“The low noise, long range, and field of view of Velodyne’s compact lidar sensors allow us to create robust systems with immense versatility, accuracy, and speed – from capture to answer.”
“Velodyne lidar and Kaarta’s advanced 3D mapping and localization algorithms are a phenomenal combination, creating a portable system for fast and easy detailed surface mapping. The ability to rapidly gather accurate and up-to-date geospatial information has countless applications.”
“Allvision, Kaarta, and Velodyne’s pooled technologies gave us the ability to visualize curbside use and occupancy on some of the busiest blocks in Pittsburgh. Exploring the data through the online dashboard and being able to see how the use of the curb changes block-by-block and over the course of a day provides powerful insight for curbside management strategies and policy. In this project, technology and infrastructure combined in the best of ways, giving us a glimpse into the future of optimizing curbside use for all users.”